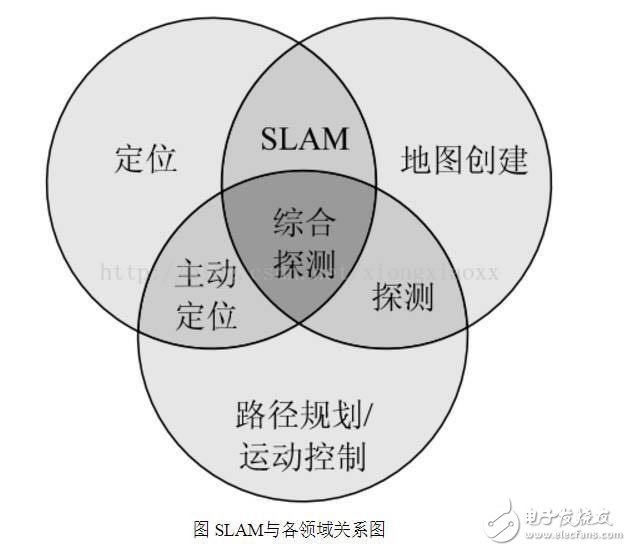
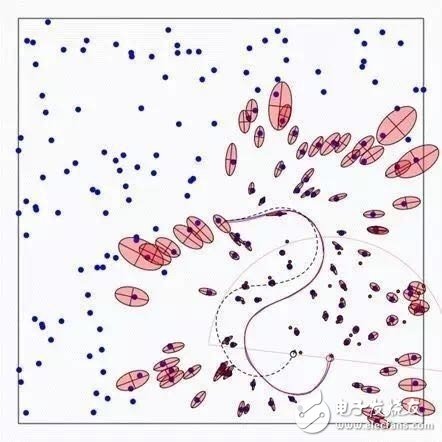
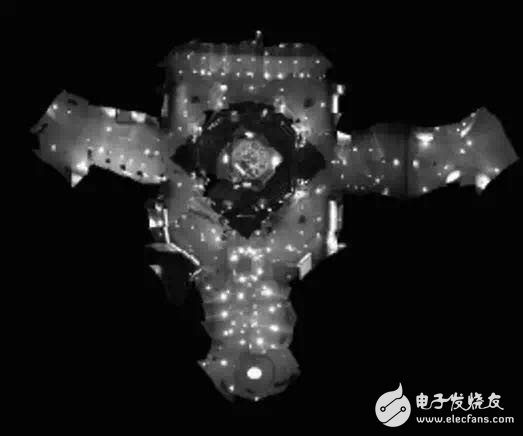
Intelligent service robots are becoming the cusp of the industry. Starting from cleaning robots, family companion robots and food delivery robots have entered the public eye. When discussing whether such robots can solve practical problems, autonomous positioning navigation technology as the first step of robot intelligence is constantly attracting attention in the industry. At the same time, as an important breakthrough in autonomous positioning navigation technology, SLAM technology has also become the focus of attention. As shown in the figure, the robot autonomous positioning navigation technology includes positioning, map creation and path planning (motion control), while SLAM itself only completes the positioning of the robot and map creation, which are different. So, how is SLAM technology implemented? What are the difficulties? How does the robot implement path planning and automatic navigation? What kind of sweeping robot is smart? These questions, Xiaobian will answer you one by one, leading everyone to understand the secret of robotic autonomous movement. Today, let's start with SLAM. SLAM is an abbreviation for Simultaneous LocalizaTIon And Mapping, first proposed by Hugh Durrant-Whyte and John J. Leonard. In fact, SLAM is more like a concept than an algorithm. It itself contains many steps, each of which can be implemented using different algorithms. It is mainly used to solve the problem of real-time positioning and map construction when mobile robots are running in an unknown environment. When you are in a different place, how can you find exactly where you want to go? How do you find a way home when you get lost outdoors? Yes, we have navigation software and outdoor maps. Like human mapping, the process of robots describing the environment and understanding the environment is mainly relying on maps. It uses an environmental map to describe its current environmental information and uses different map descriptions as the algorithm and sensor used. There are four ways to represent maps in robotics: raster maps, feature maps, direct representations, and topological maps. 1, raster map The most common way for a robot to describe an environment map is a Gridmap or OccupancyMap. A raster map divides the environment into a series of rasters, each of which gives a possible value, indicating the probability that the raster is occupied. This map looks no different from the maps that people recognize. It was first proposed by NASA's AlbertoElfes in 1989 and used on Mars rover. The essence is a bitmap image, but each of them is " "Pixels" means the probability distribution of obstacles in the actual environment. In general, the map can be used when a sensor that can directly measure distance data such as a laser radar, a depth camera, an ultrasonic sensor, or the like is used for SLAM. This map can also be drawn by distance measuring sensors, ultrasound (early), and lidar (now). 2. Feature point map The feature point map is an environment that uses related geometric features (such as points, lines, and faces), and is commonly found in vSLAM (Visual SLAM) technology. This map doesn't look so intuitive compared to raster maps. It is generally generated by the vSLAM algorithm such as GPS, UWB and camera with sparse mode. The advantage is that the relative data storage amount and computation amount are relatively small, which is more common in the earliest SLAM algorithm. 3. Direct characterization In the direct characterization method, the intermediate link of feature or grid representation is omitted, and the data read by the sensor is directly used to construct the pose space of the robot. The picture above is an image map that directly records the ceiling image of the house. This method, like a satellite map, directly integrates sensor raw data into a map by simple processing, which is relatively more intuitive. 4, topology map Topological map, a relatively more abstract form of map, represents the indoor environment as a topological map with nodes and associated links, where nodes represent important locations in the environment (corners, doors, elevators, stairs, etc.) ), the side indicates the connection relationship between the nodes, such as the corridor. This method only records the topological link relationship of the environment. Such maps are generally extracted from the previous types of maps through correlation algorithms. For example, when the sweeping robot is going to clean the room, it will create such a topology map: 5. Summary In robotics, SLAM's map construction usually refers to the creation of maps that are consistent with the geometry of the environment. The topology map established in the general algorithm only reflects the connection relationship of each point in the environment, and can not construct a geometrically consistent map. Therefore, these topological algorithms cannot be used for SLAM. Direct characterization is similar to satellite mapping, which is built directly using sensors (typically image sensors). This method has the greatest information redundancy and is a great challenge for data storage. At the same time, it takes a lot of trouble for the robot to extract useful data from it, so it is rarely used in practical applications. The feature point map is another extreme. Although the amount of data is small, it often cannot reflect some necessary information of the environment, such as the location of obstacles in the environment. In vSLAM technology, this kind of map is often used to solve the problem of robot positioning. In order to allow the robot to perform autonomous obstacle avoidance and path planning, additional distance sensors such as laser radar and ultrasonic waves are required. A raster map, or Occupancy Map, is just somewhere in it. On the one hand, it can represent many features in the space environment, robots can use it for path planning, and on the other hand, it does not directly record the sensor's raw data. Relatively achieve the optimal space and time consumption. Therefore, raster maps are currently widely used as map storage methods for robots. This map method is also used within the SLAMWARE system of Siwei Technology. When you open the navigation software in your phone, what is the first action to do before choosing the best route to your destination? Yes, it is positioning. We need to know where we are in the map before we can follow the path planning. In the robot real-time positioning problem, since the robot position information obtained by the robot motion estimation usually has a large error, we also need to correct the position of the robot using the surrounding environment information obtained by the ranging unit. At present, common ranging units include laser ranging, ultrasonic ranging, and image ranging. Among them, with the good directivity and high focusing of laser, laser radar has become the core sensor of mobile robot, and it is also the most reliable and stable positioning technology. Since its introduction in 1988, the theoretical research of SLAM has developed rapidly. In practical applications, in addition to equipped with laser radar, the robot also needs an IMU (Inertial Measurement Unit) and an odometer to provide auxiliary data for the laser radar. The computational cost of this process is enormous, and a PC-level processor is traditionally required. This has also become one of the bottlenecks that limit the widespread use of SLAM. So, what pits will you encounter in the process of implementing SLAM? Super High Voltage Film Capacitor Polyester Film Capacitor,DC Filter Capacitor,precision capacitor XIAN STATE IMPORT & EXPORT CORP. , https://www.capacitorhv.com