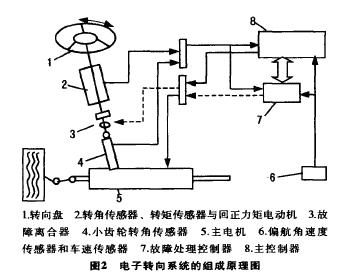
éšç€ç”µå技术的迅速å‘展,电å技术在汽车上的应用范围ä¸æ–扩大。汽车转å‘系统已从简å•çš„纯机械å¼è½¬å‘系统ã€æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统(HydraulicPowerSteering,简称HPS)ã€ç”µåŠ¨æ¶²åŽ‹åŠ©åŠ›è½¬å‘系统(ElectricHydraulicPowerSteering,简称EHPS)å‘展到如今的更为节能åŠæ“纵性能更为优越的电动助力转å‘系统(ElectricalPowerSteering,简称EPS)。EHPSå’ŒEPSç‰åŠ©åŠ›ç³»ç»Ÿåœ¨æ±½è½¦ä¸Šçš„采用,改善了汽车转å‘力的控制特性,é™ä½Žäº†é©¾é©¶å‘˜çš„转å‘负担,然而汽车转å‘ç³»ç»Ÿå§‹ç»ˆå¤„äºŽæœºæ¢°ä¼ åŠ¨é˜¶æ®µï¼Œç”±äºŽè½¬å‘ä¼ åŠ¨æ¯”å›ºå®šï¼Œæ±½è½¦è½¬å‘特性éšè½¦é€Ÿå˜åŒ–进行一定的æ“作补å¿ï¼Œä»Žè€ŒæŽ§åˆ¶æ±½è½¦æŒ‰å…¶æ„愿行驶。如果转å‘盘与转å‘轮通过控制信å·è¿žæŽ¥ï¼Œå³é‡‡ç”¨ç”µå转å‘系统(Steering-By-WireSystem,简称SBWS),转å‘盘转角和汽车å‰è½®è½¬è§’之间关系(汽车转å‘çš„è§’ä¼ é€’ç‰¹æ€§ï¼‰çš„è®¾è®¡å°±å¯ä»¥å¾—到改善,从而é™ä½Žé©¾é©¶å‘˜çš„æ“纵负担,改善人—车é—环系统性能。本文综述了电å控制转å‘技术的å‘展ã€åŽŸç†ï¼Œå¹¶æŽ¢è®¨äº†è¯¥é¡¹æŠ€æœ¯çš„å‘展趋势。 本文引用地å€: http:// 一ã€ç”µå控制转å‘系统的å‘展概况 自1953年通用汽车公å¸åœ¨å‡¯è¿ªæ‹‰å…‹å’Œåˆ«å…‹è½¿è½¦ä¸Šé¦–次批é‡ä½¿ç”¨æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统以æ¥ï¼Œæ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统给汽车的å‘展带æ¥äº†å·¨å¤§çš„å˜åŒ–,使驾驶员的转å‘æ“纵力大大é™ä½Žï¼Œè½¬å‘çš„çµæ•æ€§å¾—到了æ高。éšç€ç”Ÿäº§æŠ€æœ¯çš„å‘展,动力转å‘系统在体积ã€ä»·æ ¼å’Œæ‰€æ¶ˆè€—的功率ç‰æ–¹é¢éƒ½å–得了惊人的进æ¥ã€‚在20世纪80年代åŽæœŸï¼Œåˆå¼€å‘了å˜å‡é€Ÿæ¯”ã€ç”µæŽ§æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统。但是动力转å‘系统的技术é©æ–°éƒ½æ˜¯åŸºäºŽæ¶²åŽ‹åŠ¨åŠ›è½¬å‘ç³»ç»Ÿçš„ï¼Œæ— æ³•æ¶ˆé™¤HPS系统在布置ã€å®‰è£…ã€å¯†å°æ€§ã€æ“纵çµæ•åº¦ã€èƒ½é‡æ¶ˆè€—ã€ç£¨æŸä¸Žå™ªå£°ç‰æ–¹é¢çš„缺陷。直到1988年日本铃木公å¸é¦–次开å‘出一ç§å…¨æ–°çš„电å控制å¼ç”µåŠ¨åŠ©åŠ›è½¬å‘系统,æ‰çœŸæ£æ‘†è„±äº†æ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统的æŸç¼š[1]。 æ¤åŽï¼Œç”µåŠ¨åŠ©åŠ›è½¬å‘技术得到迅速å‘展,其应用范围已ç»ä»Žå¾®åž‹è½¿è½¦å‘大型轿车和客车方å‘å‘展。日本的大å‘汽车公å¸ã€ä¸‰è±æ±½è½¦å…¬å¸ã€æœ¬ç”°æ±½è½¦å…¬å¸ï¼Œç¾Žå›½çš„Delphiå…¬å¸ï¼Œè‹±å›½çš„Lueaså…¬å¸ï¼Œå¾·å›½çš„ZFå…¬å¸ï¼Œéƒ½ç ”制出了å„自的EPS。如大å‘汽车公å¸åœ¨å…¶Mira车上装备了EPS,三è±æ±½è½¦å…¬å¸åœ¨å…¶Minica车上装备了EPS,本田汽车公å¸åœ¨Accord车上装备了EPS。Delphiå…¬å¸å·²ç»ä¸ºå¤§ä¼—çš„Poloã€è²äºšç‰¹Puntoå¼€å‘出EPS[2]。本田还在其AcuraNXS赛车上装备了EPS[3]。 EPS的助力形å¼ä¹Ÿä»Žä½Žé€ŸèŒƒå›´åŠ©åŠ›åž‹å‘全速范围助力型å‘展,并且其控制形å¼ä¸ŽåŠŸèƒ½ä¹Ÿè¿›ä¸€æ¥åŠ 强。日本早期开å‘çš„EPS仅仅在低速和åœè½¦æ—¶æ供助力,高速时EPSå°†åœæ¢å·¥ä½œã€‚新一代的EPS则ä¸ä»…在低速和åœè½¦æ—¶æ供助力,而且还能在高速时æ高汽车的æ“纵稳定性。如日本铃木公å¸è£…备在WagonR+车上的EPS是一个负载-è·¯é¢-车速感应型助力转å‘系统[4]。由Delphiå…¬å¸ä¸ºFunte车开å‘çš„EPS为全范围助力型,并且设置了两个开关,其ä¸ä¸€ä¸ªç”¨äºŽéƒŠåŒºï¼Œå¦ä¸€ä¸ªç”¨äºŽå¸‚区和åœè½¦ã€‚当车速大于70km/håŽï¼Œè¿™ä¸¤ç§å¼€å…³è®¾ç½®çš„程åºåˆ™æ˜¯ä¸€æ ·çš„,以ä¿è¯æ±½è½¦åœ¨é«˜é€Ÿæ—¶æœ‰åˆé€‚çš„è·¯æ„Ÿï¼Œè¿™æ ·å³ä½¿æ±½è½¦è¡Œé©¶åˆ°é«˜é€Ÿå…¬è·¯æ—¶é©¾é©¶å‘˜å¿˜è®°åˆ‡æ¢å¼€å…³ä¹Ÿä¸ä¼šå‘生å±é™©ã€‚å¸‚åŒºåž‹å¼€å…³è¿˜ä¸Žæ²¹é—¨æœ‰å…³ï¼Œä½¿å¾—åœ¨è¸©æ²¹é—¨åŠ é€Ÿå’Œæ¾æ²¹é—¨å‡é€Ÿæ—¶ï¼Œè½¬å‘更平滑。 éšç€ç”µå技术的å‘展,EPS技术日趋完善,并且其æˆæœ¬å¤§å¹…度é™ä½Žï¼Œä¸ºæ¤å…¶åº”用范围将越æ¥è¶Šå¤§ã€‚ 早在20世纪60年代末,德国Kasselmannç‰è¯•å›¾å°†è½¬å‘盘与转å‘车轮之间通过导线连接(å³ç”µå转å‘系统),但由于当时电å和控制技术的制约,电å转å‘ç³»ç»Ÿä¸€ç›´æ— æ³•åœ¨å®žè½¦ä¸Šå®žçŽ°ã€‚å¥”é©°å…¬å¸äºŽ1990年开始了å‰è½®ç”µå转å‘ç³»ç»Ÿçš„æ·±å…¥ç ”å‘,并将其开å‘的电å转å‘系统应用于概念车F400Carving上。世界其他å„大汽车厂家ã€ç ”å‘机构(包括Daimler-Chryslerã€å®é©¬ã€ZFã€DELPHIã€TRWç‰ï¼‰ä»¥åŠæ—¥æœ¬çš„光洋(Koyoï¼‰ç²¾å·¥æŠ€æœ¯ç ”ç©¶æ‰€ã€æ—¥æœ¬å›½ç«‹å¤§å¦ã€æœ¬ç”°æ±½è½¦å…¬å¸ç‰ä¹Ÿå…ˆåŽå¯¹æ±½è½¦ç”µå转å‘系统åšäº†æ·±å…¥ç ”究。目å‰è®¸å¤šæ±½è½¦å…¬å¸å¼€å‘了自己的电å转å‘系统,一些国际著å汽车生产商已在其概念车上安装了该系统。 日本KoyoæŠ€æœ¯ç ”ç©¶æ‰€æ ¹æ®ä»–ä»¬è‡ªå·±çš„ç ”ç©¶è¯•éªŒç»“æžœï¼Œåˆ©ç”¨ç”µå转å‘系统进行主动控制的汽车,在摩擦系数很å°çš„åšå®žé›ªåœ°ä¸Šè¿›è¡Œè›‡è¡Œã€ç§»çº¿ã€ä¾§å‘风试验ä¸åŸºæœ¬æŒ‰ç…§é¢„å®šçš„è½¨è¿¹è¡Œé©¶ï¼Œæ¯”ä¼ ç»Ÿè½¬å‘系统在路线跟踪性能上有较大的æ高。在对开路é¢ä¸Šè¿›è¡Œåˆ¶åŠ¨è¯•éªŒä¹Ÿèƒ½åŸºæœ¬ä¿è¯æ±½è½¦çš„直线行驶,制动è·ç¦»ä¹Ÿå¤§å¤§ç¼©çŸã€‚ 日本大å¦å’Œæœ¬ç”°æ±½è½¦å…¬å¸åœ¨æ±½è½¦ç”µå转å‘系统方é¢ä¹Ÿåšäº†ä¸€äº›ç†è®ºå·¥ä½œå’Œæ¨¡æ‹Ÿå™¨è¯•éªŒç ”究。他们从人—车é—环系统特性出å‘,设计了ç†æƒ³çš„转å‘ç³»ç»Ÿä¼ åŠ¨æ¯”ï¼Œä½¿æ±½è½¦çš„ç¨³æ€å¢žç›Šä¸éšè½¦é€Ÿå˜åŒ–,并é‡ç‚¹ç ”究了驾驶员角控制特性和力控制特性对汽车主动安全性的影å“。 å®é©¬æ±½è½¦å…¬å¸çš„概念车BMWZ22,应用了SBWSå’ŒBBW(Brake-By-Wire)技术,转å‘盘的转动范围å‡å°‘到了160°,使紧急转å‘时驾驶员的忙碌程度得到了很大程度的é™ä½Žã€‚ ç›®å‰ç”±äºŽæ±½è½¦ä¾›ç”µç³»ç»Ÿçš„å› ç´ ï¼Œè½¬å‘电动机难以æ供较大功率,现阶段电å转å‘ç³»ç»Ÿçš„ç ”ç©¶ä»¥åŠè¿‘期的应用对象主è¦é’ˆå¯¹è½¿è½¦ã€‚è¦åœ¨é‡åž‹è½½è´§æ±½è½¦ä¸Šåº”用,还必须采用液压执行机构。éšç€è“„ç”µæ± æŠ€æœ¯çš„å‘展和42V电å设备在汽车上的应用,全电å转å‘系统将应用到ä¸åž‹å’Œé‡åž‹è½¦ä¸Šã€‚ç›®å‰ï¼Œ42V电æºå·²ç»åœ¨ä¸€äº›æ¦‚念车上得到应用,通用的“自主é”力â€å’ŒBertone的“FILOâ€éƒ½é‡‡ç”¨äº†42V电æºã€‚ 国内动力转å‘器目å‰è¿˜å¤„于机械—液压动力转å‘阶段,对于电动助力转å‘系统,清åŽå¤§å¦ã€åŒ—京ç†å·¥å¤§å¦ã€åŽå—ç†å·¥å¤§å¦ç‰é«˜æ ¡å¼€å±•äº†ç³»ç»Ÿç»“构方案设计和系统建模åŠåŠ¨åŠ›åˆ†æžç‰ç ”究,但目å‰è¿˜æ²¡æœ‰å®žç”¨çš„电动助力转å‘系统和电å转å‘系统。 二ã€EPS的组æˆåŽŸç†å’Œåˆ†ç±» (一)EPSçš„ç»„æˆ ç”µåŠ¨åŠ©åŠ›è½¬å‘ç³»ç»Ÿæ˜¯åœ¨ä¼ ç»Ÿæœºæ¢°è½¬å‘机构的基础上å‘展起æ¥çš„ã€‚ç³»ç»Ÿé€šå¸¸ç”±è½¬çŸ©ä¼ æ„Ÿå™¨ã€è½¦é€Ÿä¼ 感器ã€ç”µå控制器ã€ç”µåŠ¨æœºã€ç”µç£ç¦»åˆå™¨å’Œå‡é€Ÿæœºæž„ç‰ç»„æˆ[5]。Alto汽车电å控制动力转å‘系统的组æˆå¦‚图1所示。 (二)EPSçš„åŽŸç† ç”µå控制动力转å‘系统是利用电动机作为助力æºï¼Œæ ¹æ®è½¬å‘å‚数和车速ç‰ï¼Œç”±å¾®æœºå®ŒæˆåŠ©åŠ›å·¥ä½œçš„,其原ç†å¯æ¦‚述如下。 ä¸è½¬å‘时,电动机ä¸å·¥ä½œï¼›å½“æ“纵转å‘盘时,装在转å‘ç›˜è½´ä¸Šçš„è½¬çŸ©ä¼ æ„Ÿå™¨ä¸æ–检测转å‘轴上的转矩,并由æ¤äº§ç”Ÿä¸€ä¸ªç”µåŽ‹ä¿¡å·ï¼Œè¯¥ä¿¡å·ä¸Žè½¦é€Ÿä¿¡å·åŒæ—¶è¾“入电å控制器,由控制器ä¸çš„å¾®æœºæ ¹æ®è¿™äº›è¾“入信å·è¿›è¡Œè¿ç®—处ç†ï¼Œç¡®å®šåŠ©åŠ›è½¬çŸ©çš„大å°å’Œæ–¹å‘,å³é€‰å®šç”µåŠ¨æœºçš„电æµå’Œè½¬å‘,调整转å‘的辅助动力。电动机的转矩由电ç£ç¦»åˆå™¨é€šè¿‡å‡é€Ÿæœºæž„å‡é€Ÿå¢žçŸ©åŽï¼ŒåŠ 在汽车的转å‘机构上,使之得到一个与工况相适应的转å‘作用力。 电å控制电动助力转å‘æŽ§åˆ¶ç³»ç»Ÿçš„æ ¸å¿ƒæ˜¯ä¸€ä¸ª4kBROMå’Œ256kBRAMçš„8ä½å¾®æœºã€‚ 转å‘盘转矩信å·å’Œè½¦é€Ÿä¿¡å·ç»è¿‡è¾“入接å£é€å…¥å¾®æœºï¼Œéšç€è½¦é€Ÿçš„æ高,通过微机控制相应地é™ä½ŽåŠ©åŠ›ç”µåŠ¨æœºç”µæµï¼Œä»¥å‡å°‘助力转矩。å‘动机转速信å·ä¹Ÿè¢«é€å…¥å¾®æœºï¼Œå½“å‘åŠ¨æœºå¤„äºŽæ€ é€Ÿæ—¶ï¼Œç”±äºŽä¾›ç”µä¸è¶³ï¼ŒåŠ©åŠ›ç”µåŠ¨æœºå’Œç¦»åˆå™¨ä¸å·¥ä½œã€‚点ç«å¼€å…³çš„通æ–(on/off)信å·ç»A/D转æ¢æŽ¥å£é€å…¥å¾®æœºï¼Œå½“点ç«å¼€å…³æ–开时,电动机和离åˆå™¨ä¸èƒ½å·¥ä½œã€‚微机控制指令ç»D/A转æ¢åŽé€å…¥ç”µåŠ¨æœºå’Œç¦»åˆå™¨çš„驱动放大电路ä¸ï¼ŒæŽ§åˆ¶ç”µåŠ¨æœºçš„旋转方å‘和离åˆå™¨çš„结åˆã€‚电动机的电æµç»é©±åŠ¨æ”¾å¤§å›žè·¯ã€ç”µæµè¡¨Aã€A/D转æ¢æŽ¥å£å馈给微机,将电动机的实际电æµä¸ŽæŒ‰å¾®æœºæŒ‡ä»¤åº”给的电æµç›¸æ¯”较,调节电动机的实际电æµï¼Œä½¿ä¸¤è€…接近一致。 (三)EPS分类 æ ¹æ®ç”µåŠ¨æœºé©±åŠ¨éƒ¨ä½çš„ä¸åŒï¼Œå°†ç”µåŠ¨åŠ©åŠ›è½¬å‘系统分为3类:转å‘轴助力å¼ã€è½¬å‘器å°é½¿è½®åŠ©åŠ›å¼å’Œé½¿æ¡åŠ©åŠ›å¼[6-10]。 图1为转å‘轴助力å¼è½¬å‘ç³»ç»Ÿã€‚å…¶è½¬çŸ©ä¼ æ„Ÿå™¨ã€ç”µåŠ¨æœºã€ç¦»åˆå™¨å’Œè½¬å‘助力机构组æˆä¸€ä½“,安装在转å‘柱上。其特点是结构紧凑,所测å–的转矩信å·ä¸ŽæŽ§åˆ¶ç›´æµç”µåŠ¨æœºåŠ©åŠ›çš„å“应性较好。这ç§ç±»åž‹ä¸€èˆ¬åœ¨è½¿è½¦ä¸Šä½¿ç”¨ã€‚ å°é½¿è½®åŠ©åŠ›å¼è½¬å‘ç³»ç»Ÿçš„è½¬çŸ©ä¼ æ„Ÿå™¨ã€ç”µåŠ¨æœºã€ç¦»åˆå™¨å’Œè½¬å‘助力机构ä»ä¸ºä¸€ä½“,åªæ˜¯æ•´ä½“安装在转å‘å°é½¿è½®å¤„,直接给å°é½¿è½®åŠ©åŠ›ï¼Œå¯èŽ·å¾—较大的转å‘力。该形å¼å¯ä½¿å„部件布置更方便,但当转å‘盘与转å‘器之间装有万å‘ä¼ åŠ¨è£…ç½®æ—¶ï¼Œè½¬çŸ©ä¿¡å·çš„å–得与助力车轮部分ä¸åœ¨åŒä¸€ç›´çº¿ä¸Šï¼Œå…¶åŠ©åŠ›æŽ§åˆ¶ç‰¹æ€§éš¾ä»¥ä¿è¯å‡†ç¡®ã€‚ 齿æ¡åŠ©åŠ›å¼è½¬å‘ç³»ç»Ÿçš„è½¬çŸ©ä¼ æ„Ÿå™¨å•ç‹¬åœ°å®‰è£…在å°é½¿è½®å¤„,电动机与转å‘助力机构一起安装在å°é½¿è½®å¦ä¸€ç«¯çš„齿æ¡å¤„,用以给齿æ¡åŠ©åŠ›ã€‚该类型åˆæ ¹æ®å‡é€Ÿä¼ 动机构的ä¸åŒå¯åˆ†ä¸ºä¸¤ç§:一ç§æ˜¯ç”µåŠ¨æœºåšæˆä¸ç©ºçš„。齿æ¡ä»Žä¸ç©¿è¿‡ï¼Œç”µåŠ¨æœºçš„动力ç»ä¸€å¯¹æ–œé½¿è½®å’Œèžºæ†èžºæ¯ä¼ 动副以åŠä¸Žèžºæ¯åˆ¶æˆä¸€ä½“的铰接å—ä¼ ç»™é½¿æ¡ã€‚è¿™ç§ç»“构是第一代电动助力转å‘系统,由于电动机ä½äºŽé½¿æ¡å£³ä½“内,结构å¤æ‚ï¼Œä»·æ ¼é«˜ï¼Œç»´ä¿®ä¹Ÿå›°éš¾ã€‚å¦ä¸€ç§æ˜¯ç”µåŠ¨æœºä¸Žé½¿æ¡çš„壳体相互独立。电动机动力ç»å¦ä¸€å°é½¿è½®ä¼ 给齿æ¡ï¼Œç”±äºŽæ˜“äºŽåˆ¶é€ å’Œç»´ä¿®ï¼Œæˆæœ¬ä½Žï¼Œå·²å–代了第一代产å“ã€‚å› ä¸ºé½¿æ¡ç”±ä¸€ä¸ªç‹¬ç«‹çš„齿轮驱动,å¯ç»™ç³»ç»Ÿè¾ƒå¤§çš„助力,主è¦ç”¨äºŽé‡åž‹æ±½è½¦ã€‚ 三ã€ç”µå转å‘系统 电å转å‘系统(Steering-By-WireSystem,SBWS)由转å‘盘模å—ã€è½¬å‘执行模å—和主控制器(ECU)3个主è¦éƒ¨åˆ†ä»¥åŠè‡ªåŠ¨é˜²æ•…障系统ã€ç”µæºç‰è¾…助模å—组æˆï¼Œå¦‚图2所示。转å‘盘模å—包括转å‘盘ã€è½¬å‘ç›˜è½¬è§’ä¼ æ„Ÿå™¨ã€è½¬çŸ©ä¼ 感器和转å‘盘回æ£åŠ›çŸ©ç”µåŠ¨æœºã€‚其主è¦åŠŸèƒ½æ˜¯å°†é©¾é©¶å‘˜çš„转å‘æ„图(通过测é‡è½¬å‘盘转角)转æ¢æˆæ•°å—ä¿¡å·å¹¶ä¼ 递给主控制器;åŒæ—¶æŽ¥æ”¶ä¸»æŽ§åˆ¶å™¨é€æ¥çš„力矩信å·ï¼Œäº§ç”Ÿè½¬å‘盘回æ£åŠ›çŸ©ï¼Œä»¥æ供给驾驶员相应的路感信æ¯ã€‚ 转å‘执行模å—ç”±å‰è½®è½¬è§’ä¼ æ„Ÿå™¨ã€è½¬å‘执行电动机ã€è½¬å‘电动机控制器和å‰è½®è½¬å‘组件ç‰ç»„æˆã€‚其主è¦åŠŸèƒ½æ˜¯æŽ¥æ”¶ä¸»æŽ§åˆ¶å™¨çš„命令,控制转å‘电动机实现è¦æ±‚çš„å‰è½®è½¬è§’,完æˆé©¾é©¶å‘˜çš„转å‘æ„图。 主控制器对采集的信å·è¿›è¡Œåˆ†æžå¤„ç†ï¼Œåˆ¤åˆ«æ±½è½¦çš„è¿åŠ¨çŠ¶æ€ï¼Œå‘转å‘盘回æ£åŠ›çŸ©ç”µåŠ¨æœºå’Œè½¬å‘电动机å‘é€å‘½ä»¤ï¼ŒæŽ§åˆ¶ä¸¤ä¸ªç”µåŠ¨æœºçš„工作,尽å¯èƒ½ä¿è¯åœ¨ä¸åŒè½¦é€Ÿä¸‹æ±½è½¦è½¬å‘å“应特性基本一致,å‡å°‘驾驶员对汽车转å‘特性éšè½¦é€Ÿå˜åŒ–而进行补å¿çš„任务,å‡è½»é©¾é©¶å‘˜è´Ÿæ‹…。åŒæ—¶æŽ§åˆ¶å™¨è¿˜å¯ä»¥å¯¹é©¾é©¶å‘˜çš„æ“作指令进行识别,判定在当å‰çŠ¶æ€ä¸‹é©¾é©¶å‘˜çš„转å‘æ“作是å¦åˆç†ï¼Œå½“汽车处于éžç¨³å®šçŠ¶æ€æˆ–驾驶员å‘出错误指令时,电å转å‘系统将自动进行稳定控制或将驾驶员错误的转å‘æ“作å±è”½ï¼Œè€Œä»¥åˆç†çš„æ–¹å¼è‡ªåŠ¨é©¾é©¶è½¦è¾†ï¼Œä½¿æ±½è½¦å°½å¿«åœ°æ¢å¤åˆ°ç¨³å®šçŠ¶æ€ã€‚ 故障处ç†æŽ§åˆ¶å™¨æ˜¯ç”µå转å‘系统的é‡è¦æ¨¡å—,它包括一系列的监控和实施算法,针对ä¸åŒçš„故障形å¼å’Œæ•…éšœç‰çº§ä½œå‡ºç›¸åº”的处ç†ï¼Œä»¥æ±‚最大é™åº¦åœ°ä¿æŒæ±½è½¦çš„æ£å¸¸è¡Œé©¶ã€‚它采用å•ç‹¬çš„专用处ç†å™¨ï¼Œèƒ½æ›´å¥½åœ°æ高汽车安全性能。 电å转å‘系统目å‰å˜åœ¨ä¸¤ç§å½¢å¼:å‰è½®ç”µå转å‘系统和åŽè½®ç”µå转å‘系统。å‰è€…ï¼Œä¼ ç»Ÿçš„è½¬å‘元件被2个布置在汽车å‰ä¾§è§’è½çš„激励器所代替,这2个激励器从控制器获å–ä¿¡æ¯ï¼Œä»Žè€Œé©±åŠ¨å‰è½®ï¼ŒåŒæ—¶ï¼Œè¯¥ç³»ç»Ÿè¿˜åˆ©ç”¨ç”µåŠ¨æœºå‘驾驶员æ供路é¢ä¿¡æ¯ã€‚至于åŽè½®ç”µå转å‘ç³»ç»Ÿï¼Œåˆ™æ˜¯åˆ©ç”¨ä¼ æ„Ÿå™¨æ¥ç¡®å®šåŽè½®çš„å转,并以å‰è½®çš„å转角度和车速作为å‚考。 å››ã€ç”µå控制动力转å‘系统的特点 将电å控制动力转å‘系统åŒæ™®é€šæ¶²åŽ‹åŠ¨åŠ›è½¬å‘系统的性能进行比较[8-12],其优越性主è¦è¡¨çŽ°åœ¨ä»¥ä¸‹å‡ 个方é¢ã€‚ 1.在å„ç§è¡Œé©¶å·¥å†µä¸‹æ供最佳助力,å‡å°ç”±è·¯é¢ä¸å¹³æ‰€å¼•èµ·çš„对转å‘系统的扰动,改善汽车的转å‘特性,å‡è½»æ±½è½¦ä½Žé€Ÿè¡Œé©¶æ—¶çš„转å‘æ“纵力,æ高汽车高速行驶时的转å‘稳定性,进而æ高汽车的主动安全性。并且å¯é€šè¿‡è®¾ç½®ä¸åŒçš„转å‘助力特性æ¥æ»¡è¶³ä¸åŒä½¿ç”¨å¯¹è±¡çš„需è¦ã€‚ 2.电å控制动力转å‘系统åªæœ‰åœ¨è½¬å‘时电动机æ‰æ供助力(而HPSå³ä½¿åœ¨ä¸è½¬å‘时,油泵也一直è¿è½¬ï¼‰ï¼Œå› 而能å‡å°‘燃料消耗。åŒæ—¶å–消了油泵ã€çš®å¸¦ã€çš®å¸¦è½®ã€æ¶²åŽ‹è½¯ç®¡ç‰ï¼Œå…¶é›¶ä»¶æ¯”HPS大大å‡å°‘ï¼Œå› è€Œå…¶è´¨é‡è½»ï¼Œç»“构紧凑,在安装ä½ç½®é€‰æ‹©æ–¹é¢ä¹Ÿæ›´å®¹æ˜“,并且能é™ä½Žå™ªå£°ã€èŠ‚çœèƒ½æºã€å‡å°‘废气排放。 3.由于直接由电动机æä¾›åŠ©åŠ›ï¼Œç”µåŠ¨æœºç”±è“„ç”µæ± ä¾›ç”µï¼Œå› æ¤EPS能å¦åŠ©åŠ›ä¸Žå‘动机是å¦èµ·åŠ¨æ— 关,å³ä½¿åœ¨å‘动机熄ç«æˆ–出现故障时也能æ供助力。 4.电å控制动力转å‘系统没有液压回路,比HPS更容易调整和检测,装é…自动化程度更高。并且å¯ä»¥é€šè¿‡è®¾ç½®ä¸åŒçš„程åºèƒ½å¿«é€Ÿåœ°ä¸Žä¸åŒè½¦åž‹ç›¸åŒ¹é…ï¼Œå› è€Œèƒ½ç¼©çŸå¼€å‘和生产周期。 5.液压动力转å‘系统在低温下起动å‘动机åŽï¼Œç”±äºŽä½Žæ¸©ä¸‹æ²¹çš„粘度较大,转å‘时作用力较高。电动助力转å‘系统在低温下ä¸ä¼šå¢žåŠ 转å‘作用力和å‘动机负è·ï¼Œå› 而其低温è¿è¡ŒçŠ¶å†µå¥½äºŽå‰è€…。 6.SBWS系统还能改善驾驶员的“路感â€ã€‚由于转å‘盘和转å‘è½®ä¹‹é—´æ— æœºæ¢°è¿žæŽ¥ï¼Œé©¾é©¶å‘˜â€œè·¯æ„Ÿâ€é€šè¿‡æ¨¡æ‹Ÿç”Ÿæˆã€‚在回æ£åŠ›çŸ©æŽ§åˆ¶æ–¹é¢å¯ä»¥ä»Žä¿¡å·ä¸æ出最能够åæ˜ æ±½è½¦å®žé™…è¡Œé©¶çŠ¶æ€å’Œè·¯é¢çŠ¶å†µçš„ä¿¡æ¯ï¼Œä½œä¸ºè½¬å‘盘回æ£åŠ›çŸ©çš„控制å˜é‡ï¼Œä½¿è½¬å‘盘仅仅å‘驾驶员æ供有用信æ¯ï¼Œä»Žè€Œä¸ºé©¾é©¶å‘˜æ供更为真实的“路感â€ã€‚ 7.SBWS能消除转å‘干涉问题,为实现多功能全方ä½çš„自动控制以åŠæ±½è½¦åŠ¨æ€æŽ§åˆ¶ç³»ç»Ÿå’Œæ±½è½¦å¹³é¡ºæ€§æŽ§åˆ¶ç³»ç»Ÿçš„集æˆæ供了显著的先决æ¡ä»¶ã€‚ 8.对å‰è½®é©±åŠ¨æ±½è½¦ï¼Œåœ¨å®‰è£…å‘动机时需è¦è€ƒè™‘刚性转å‘è½´å 用空间,转å‘è½´å¿…é¡»ä¾æ®æ±½è½¦æ˜¯å·¦ä¾§è¿˜æ˜¯å³ä¾§é©¾é©¶ï¼Œå®‰è£…在å‘动机附近,设计人员必须å调处ç†å„ç§éœ€è¦å®‰æŽ’部件。而SBWS去掉了原æ¥è½¬å‘系统å„个模å—之间的刚性机械连接,大大方便了系统的总布置。 五ã€ç”µå控制动力转å‘系统的å‘展趋势 电动助力转å‘系统ç»è¿‡åå‡ å¹´çš„å‘展,在é™ä½Žè‡ªé‡ã€å‡å°‘生产æˆæœ¬ï¼ŒæŽ§åˆ¶ç³»ç»Ÿå‘çƒã€ç”µæµæ¶ˆè€—ã€å†…部摩擦,整车进行匹é…获得åˆç†çš„助力特性以åŠä¿è¯è‰¯å¥½çš„路感方é¢å–得了é‡å¤§è¿›æ¥ã€‚电动助力转å‘系统在æ“纵舒适性和安全性ã€èŠ‚能ç‰æ–¹é¢å……分显示了其优越性,如今已在轻型车和轿车上得到应用并具有良好的工作性能。éšç€ç›´æµç”µæœºæ€§èƒ½çš„改进,其应用范围将越æ¥è¶Šå¹¿ã€‚æ®TRWå…¬å¸é¢„测,到2010年,全世界生产的æ¯3辆轿车ä¸å°±æœ‰1辆装备EPS,特别是低排放汽车ã€æ··åˆåŠ¨åŠ›æ±½è½¦ã€ç‡ƒæ–™ç”µæ± 汽车ã€ç”µåŠ¨æ±½è½¦å°†æž„æˆæœªæ¥æ±½è½¦å‘展的主体,这给电å控制转å‘系统带æ¥äº†æ›´åŠ 广阔的应用å‰æ™¯ã€‚ 尽管目å‰åœ¨æ¬§æ´²æ±½è½¦æ³•è§„ä¸è¦æ±‚驾驶员与转å‘车轮之间必须有机械连接,电å转å‘系统还ä¸å…许在欧洲上市。但åªè¦ç”Ÿäº§å•†èƒ½å¤Ÿæœ‰è¶³å¤Ÿçš„è¯æ®è¡¨æ˜Žç”µå转å‘系统的安全å¯é 性,它得到上市许å¯è¿˜æ˜¯å®Œå…¨å¯èƒ½çš„。电å控制转å‘系统的最终å‘å±•è¶‹åŠ¿åœ¨ä»¥ä¸‹å‡ ä¸ªæ–¹é¢ã€‚ 1.改善控制系统性能ã€å‡å°æŽ§åˆ¶å•å…ƒå’Œé©±åŠ¨å•å…ƒçš„体积åŠé™ä½ŽæŽ§åˆ¶ç³»ç»Ÿçš„åˆ¶é€ æˆæœ¬ï¼Œä½¿ä¹‹æ›´å¥½åœ°ä¸Žä¸åŒæ¡£æ¬¡æ±½è½¦ç›¸é€‚应。如改进电动机控制技术,消除由于电动机惯性大ã€æ‘©æ“¦åŠ›æ‰€å¸¦æ¥çš„转å‘路感ä¸è¶³ç‰ç¼ºç‚¹ï¼Œä½¿ç”µåŠ¨åŠ©åŠ›è½¬å‘系统也能应用于é‡åž‹è½½è´§æ±½è½¦ä¸Šã€‚ 2.实现电动助力转å‘系统控制å•å…ƒä¸Žæ±½è½¦ä¸Šå…¶ä»–控制å•å…ƒçš„通讯è”系,以实现整车电å控制系统一体化。 3ï¼Žå°†æ ¹æ®è½¦é€Ÿã€è½¬çŸ©ã€è½¬å‘角ã€è½¬å‘速度ã€æ¨ªå‘åŠ é€Ÿåº¦ã€å‰è½´é‡åŠ›ç‰å¤šç§ä¿¡å·è¿›è¡Œä¸Žæ±½è½¦ç‰¹æ€§ç›¸å»åˆçš„综åˆæŽ§åˆ¶ï¼Œä»¥èŽ·å¾—更好的转å‘路感。 4.æ高系统的å¯é 性。这应从æ高系统å„部件的å¯é 性入手,如采用éžæŽ¥è§¦å¼è½¬çŸ©ä¼ 感器。 5.æ高系统的安全性。采用å–消转å‘盘的SBWS系统åŽï¼Œé©¾é©¶å®¤æœ‰æ›´å¤§çš„空间用于布置被动安全部件,å‡å°‘了å±é™©å‘生时对乘员的伤害。 电动转å‘技术由于其技术先进,性能优越,未æ¥å¿…å°†å–代其他动力转å‘技术,æˆä¸ºåŠ¨åŠ›è½¬å‘技术的主æµã€‚线控动力转å‘系统将是动力转å‘系统的å‘展方å‘,是未æ¥æ±½è½¦å¯¹å®‰å…¨æ€§ã€æ“纵稳定性和舒适性的更高è¦æ±‚,有ç€å¾ˆå¥½çš„å‘展å‰æ™¯ã€‚ 当然,在汽车迈å‘å…¨é¢çº¿æŽ§è½¬å‘之å‰ï¼Œç”µåŠ¨è½¬å‘系统是“ä¸ç«™â€ï¼Œæ˜¯ç¬¬ä¸€æ¥ï¼Œå½“汽车装有电动转å‘系统时,其ä¸çš„转å‘电动机将接å—ä¸€ç³»åˆ—ä¼ æ„Ÿå™¨ä¿¡å·ï¼Œä¾‹å¦‚转å‘控制ã€åŠ¨æ€ç¨³å®šæŽ§åˆ¶ç‰ï¼Œæœ€åŽæœºæ¢°çš„部分一个一个消失,é€æ¸å˜æˆäº†å…¨é¢çº¿æŽ§è½¬å‘。 Fast Recovery Diode (FRD) is a kind of semiconductor diode with good switching characteristics and short reverse recovery time. It is mainly used in electronic circuits such as switching power supply, PWM pulse width modulator and inverter, as high frequency Rectifier Diode. Use for freewheeling diodes or damper diodes. The internal structure of the fast recovery diode is different from that of a normal PN junction diode. It belongs to a PIN junction diode, which adds a base region I between the P-type silicon material and the N-type silicon material to form a PIN silicon wafer. Since the base region is thin and the reverse recovery charge is small, the reverse recovery diode has a short reverse recovery time, a low forward voltage drop, and a high reverse breakdown voltage (withstand voltage value). Fast Diode,Fast Recovery Rectifier Diode,Fast Recovery Diode,Fast Switching Diode Dongguan Agertech Technology Co., Ltd. , https://www.agertechcomponents.com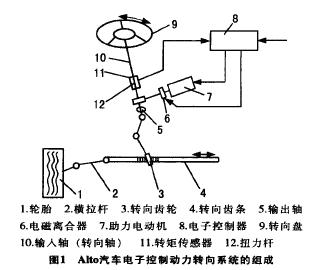
Â