Abstract: Introduce the working principle of long stator synchronous linear motor used in magnetic levitation train, and point out its electromagnetic design features, especially the difference in design from the general rotating electrical machine. And the electromagnetic design program is compiled for long stator synchronous linear The calculation of the motor provides the basis.
Keywords: maglev train; long stator synchronous linear motor; electromagnetic design
A foreign transportation research report pointed out that medium- and long-distance transportation between large cities with a distance of about 800 km is too far for cars and trains, and too close to airplanes, which is very uneconomical in terms of cost. However, this distance is very suitable for maglev trains. Maglev trains can fill the transport gap between cars, trains and aircraft at a speed of up to 500 km / h, and can also reduce the environmental pollution of cars and aircraft [ 1 ]. Therefore, the maglev train will become a powerful supplement to the existing transportation system, and the problem of high-speed long-distance transportation in industrial countries is expected to be solved.
There are two major systems for high-speed maglev railway transportation: EMS and EDS. EMS (locomotive side drive) is an attractive electromagnetic suspension system, and EDS (track side drive) is a repulsive electric suspension system. The development of the German magnetic levitation train has gone through the process from long stator synchronous linear motor EDS, short stator asynchronous linear motor EMS, to long stator synchronous linear motor EMS, and finally determined the development route of long stator EMS.
The German high-speed maglev train opens up new prospects for railway transportation with its non-contact electromagnetic levitation, drive and guidance system. The speed of the maglev train is up to 500 km / h. Although the running speed is high, the energy consumption is not large, there is no friction loss during operation, the comfort is good, and the impact on the environment is small [2]. In addition, its suspension and guidance system surrounds the guide rail (that is, the vehicle wraps the road from the outside), and the suspension, guidance and braking functions are designed to be redundant and different, so it is very safe during operation.
After several decades of development, the technology of German maglev trains has matured. At present, several countries such as Germany, the United States and China are considering the use of long stator maglev trains. In the United States, Las Vegas has decided to use German high-speed maglev trains on the transportation line between the city and Los Angeles; Germany has also launched a large-scale investigation of the application of maglev trains in the country, Rhine Corridor / Main —Rheinland / Ruhr and North and South Germany are all considered; Shanghai, China is building a maglev railway, using the German high-speed maglev train TR -08 technology, and strives to become the world ’s first practical maglev railway.
1 Long stator synchronous linear motor
1.1 Working principle
The contactless traction technology of the German TR magnetic levitation train requires the use of long stator synchronous linear motors. The stator core of the motor is laminated with 015 mm thick electrical steel sheets and is fixed to the lower part of the guide rail; the three-phase winding of the stator is composed of a protective cable, pre-formed, and embedded in the stator on both sides of the guide rail by the wire laying car In the slot. After the stator three-phase windings are energized, a moving magnetic field is generated, which interacts with the suspended (excitation) magnets arranged on the vehicle to achieve traction. Its working principle is shown in Figure 1:

Figure 1 Working principle diagram of long stator synchronous linear motor
In order to obtain a constant levitation force, the German TR type magnetic levitation train adopts the principle of attracting electromagnetic levitation, and the levitation force is generated by forming an air gap magnetic flux between the stator core of the synchronous motor and the levitation magnet on the vehicle. Its suspension and traction system are combined into one, which is also the advantage of the German TR type magnetic levitation train. In order to meet the requirements of high-speed train operation, TR-type magnetic levitation trains use independent guidance systems. Steel plates (guide and brake rails) are arranged vertically on both sides of the line. Guide magnets are arranged on both sides of the vehicle, which are formed with the steel plates of the line. Close the loop. After the electromagnet coil is energized, it can generate sufficient lateral guidance force, but the independent guidance system increases the weight of the vehicle and the cost of the line [3].
Because the line is very long, in order to avoid energy loss, the long stator line is divided into independent sections, and the power is only connected to the section where the vehicle is located, and the substation supplies power to the stator three-phase windings installed on both sides of the line. By changing the frequency of the three-phase alternating current, the traction force can be adjusted continuously from the standstill to the running speed.
1. 2 electromagnetic design features
Compared with the general rotating electrical machine, the design calculation of long stator synchronous linear motor is roughly the same, and it needs to go through several parts: magnetic circuit calculation, parameter calculation, rated excitation magnetomotive force calculation, excitation data calculation, loss and efficiency calculation [4]. The difference is that when designing a long stator synchronous linear motor, it is necessary to consider the characteristics of the long stator linear motor and the difference from the general rotating electric machine. The main performances are:
(1) The rotor of a rotating electric machine is subjected to centrifugal force, and the rotor of a linear electric machine is not subject to centrifugal force.
(2) The radial unilateral magnetic pulling force of the rotating motor cancels each other, leaving only the tangential force, which generates electromagnetic torque; the linear unilateral magnetic pulling force of the linear motor does not cancel out, and it is just used as the suspension force.
(3) The linear motor has an edge effect.
(4) Generally, the stator winding of a rotating motor works for a long time, and there is always current flowing in the winding; while the stator winding of a long stator linear motor is energized for a short time and works for a short time.
In summary, it can be seen that the long stator synchronous linear motor has its own electromagnetic design characteristics, which are summarized as follows:
(1) The number of motor poles is large, and the number of slots per phase per pole q = 1; to facilitate winding arrangement, the long stator uses a single-layer winding and is directly buried with a cable.
(2) The long stator winding works for a short time, and the stator winding current density j1 can be selected to be larger.
(3) Since the number of slots per phase per pole is q = 1 and the uniform air gap is used, the harmonic magnetic momentum of the stator teeth is large. The first-order and second-order harmonic magnetic fields generated by the stator teeth are used on the surface of the rotor excitation pole The linear generator windings interact to induce alternating current in the linear generator windings and output electrical power. When the train running speed exceeds 100 km / h, the excitation magnetic energy, air conditioning, lighting equipment and auxiliary equipment necessary for the vehicle are all provided by the linear generator.
(4) The rotor is not affected by the centrifugal force, and the air gap is uniform, so the main pole no longer requires molded pole shoes.
(5) The unilateral magnetic pulling force is used as the levitation force, so the linear motor also needs to calculate the levitation force in addition to the thrust.
(6) The edge effect should be calculated by the finite element method, and the parameters and thrust of the direct axis synchronous reactance xd, the cross axis synchronous reactance xq and the direct axis transient reactance xd ′ should be appropriately corrected.
(7) The calculation formula of the skin effect coefficient KF of the rotating synchronous motor cannot be applied to the linear motor. When the frequency f> 30 Hz, the coefficient of the linear motor changing with the frequency is taken as KF = 1 + 0.004 (f -30). In addition, due to different structures, the calculation formulas of mechanical loss and temperature rise of rotating synchronous motors are not applicable to linear motors, and new calculation formulas are needed.
(8) The suspension and traction systems are combined into one, and the excitation required for the magnetic circuit of the motor can be determined according to the weight of the train. First determine the size of the suspension force by the weight of the vehicle, and then calculate the air gap magnetic density and the air gap magnetic flux to determine the excitation magnetomotive force required by the magnetic circuit.
(9) The weight of the train can be regarded as a constant during operation, so the levitation force and the air gap magnetic density generating the levitation force are basically constant. The excitation current is adjusted during operation to keep the air gap magnetic density unchanged. It can be seen that the thrust force and the stator winding current Proportional to.
(10) From the speed formula v = 2 fτ, we can see that when the frequency increases, the speed increases, and the running resistance must increase, so the required thrust and current must increase accordingly, that is, the maximum running resistance at the maximum frequency, the corresponding thrust and current The steady state value will also be the largest.
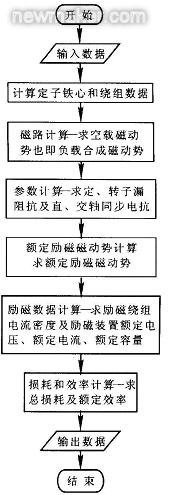
Figure 2 Main program block diagram
(12) When the air gap magnetic flux is kept constant during operation, the magnetic flux density of each part of the motor magnetic circuit is also unchanged. Therefore, the required excitation magnetic momentum of the magnetic circuit must be independent of frequency.
(13) The armature reaction occurs at the location of the train. The calculation of the armature reaction reactance and armature reaction magnetomotive force is the same as that of a general rotating electrical machine. Without a train, the stator windings only generate leakage magnetic flux and leakage electromotive force.
(14) Since the iron loss is approximately proportional to the 1.3th power of the frequency, and is also proportional to the square of the air gap magnetic density, and the air gap magnetic density does not change when the train weight is fixed, the iron loss only changes with frequency and the maximum frequency The iron consumption is the largest; and because the copper consumption is proportional to the square of the current, and the current steady-state value is the largest when the frequency is maximum, the copper consumption during steady-state operation is also the largest when the frequency is maximum.
1.3 Electromagnetic design program block diagram Based on the electromagnetic design features of the long stator synchronous linear motor, the electromagnetic design program is compiled. The main program block diagram is shown in Figure 2.
2 Calculation examples
This program has been used to calculate the long stator synchronous linear motor. The size of the calculation example is shown in Figure 3. The train consists of two vehicles, with a total length of 54.2 m, a total train weight of 108.4 t, a maximum speed of 400 km / h, and a running resistance of 60. 4 kN (at 400 km / h). Motor Y connection method, the maximum phase voltage is 4 500 V, the maximum phase current is 1 200 A, the power supply frequency is 0 to 215 Hz, the number of main pole pairs is 160, the pole distance is 258 mm, and the air gap is 10 mm.
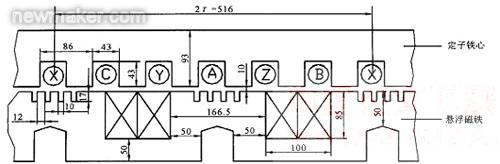
Figure 3 Example dimensions of long stator synchronous linear motor
The calculated parameter values ​​are: at 75 ℃, 215 Hz, the stator resistance of each phase of the 300 m power supply section is 0.283 8 Ω, the stator leakage reactance is 21021 8Ω, the direct axis synchronous reactance is 1.195 8Ω, and the cross axis is synchronous The reactance is 0.943 3Ω, the field winding resistance is 0.815 5Ω, and the field winding leakage reactance is 0.172 9 Ω. The other main calculation data are: the air gap magnetic potential drop is 11 967 A, the no-load required excitation magnetomotive force is 12 630 A, and the required excitation magnetomotive force at rated load is 1 2280 A. The current density of the excitation winding is 1.79 A / mm2 at no load, the current density of the excitation winding is 1.74 A / mm2 at rated load, the rated voltage of the excitation device is 295 V, the rated current is 307 A, and the rated capacity is 90 kW.
In the 300 m power supply section, when the train runs at a constant speed of 400 km / h, the rated phase voltage of the motor is 4441 V, the rated phase current is 758 A, the total loss is 647 W, and the rated efficiency is 91%.
3 Conclusion
The working principle of long stator synchronous linear motor is introduced, its electromagnetic design features are pointed out and the electromagnetic design program is compiled, which provides a basis for the calculation of long stator synchronous linear motor.
references:
[1] Compiled by Liu Huaqing et al. A new choice for Transrapid travelers of maglev trains [M]. Chengdu: University of Electronic Science and Technology Press, 1995.
[2] Meins J, Miller L, Mayer WJ. The high Speed ​​Maglev TransportaTIon System Transrapid [J]. IEEE Trans. MagneTIcs, 1998, 24 (2): 808-811.
[3] Continuous three. Principle and technical characteristics of maglev train [J]. Electric locomotive technology, 2001, 24 (3): 23-26.
[4] Electromagnetic calculation formula of salient pole synchronous motor [D]. Beijing: The First Ministry of Machinery Industry of the People's Republic of China, 1965.
1.The heat transfer rate is up to more than 90%, saving energy and
electricity
2. The honeycomb circuit has planar heating, and the effective
heating area accounts for a large proportion, about 60% of the
product area, and the heated object is heated more evenly
3. Radiate far-infrared light wave, making the heat source softer
4. Wide circuit and connected design, no need to worry about
crimping the circuit break
5. Add the thermostat protection device, which can ensure the
product safety under bad conditions and effectively prevent the
superhigh temperature of the object being heated
Under Tank Pad
Under Tank Pad,Greenhouse Heater for Plant Growing,Electric Seeding Mat,Germinate Seeds Heating Pad
ShenZhen XingHongChang Electric CO., LTD. , https://www.xhc-heater.com