BigDog robot sensor is powerful
Boston Dynamics is a remarkable company that originated from the Massachusetts Institute of Technology. Known for its advanced robotics, the company has developed a range of machines that emulate the movement and agility of animals. These include robots capable of climbing vertical surfaces, navigating tight spaces, and even transforming their shape to adapt to different environments. Each of these innovations enhances human and animal capabilities, much like a superhuman performance.
This article highlights one of Boston Dynamics' most iconic creations: BigDog, a four-legged robot resembling a large dog. Standing about three feet tall and three feet long, it weighs 240 pounds and is designed to carry up to 340 pounds—making it ideal for rugged terrain and heavy-duty tasks.

BigDog is a quadrupedal robot with a robust design, standing at around three feet in height and length, and weighing 240 pounds (Photo courtesy of Boston Dynamics).
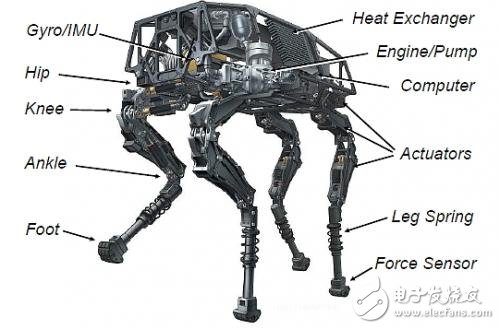
It is equipped with 50 sensors that feed real-time data to the onboard computer, helping the robot maintain balance, navigate, and recover if it stumbles or veers off course (Photo courtesy of Boston Dynamics).
Powered by a 15-horsepower micro-racing engine, BigDog’s system uses a two-stroke, single-cylinder engine that runs water-cooled to drive its hydraulic system. This powers the four legs, which are engineered to mimic the natural movement of large mammals, allowing for dynamic and stable motion over uneven ground.
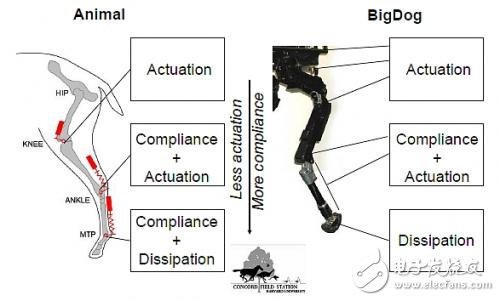
The robot's legs are designed to replicate the movement patterns of large animals, enabling it to move with agility and strength (Photo courtesy of Concord Field Station, Harvard University).
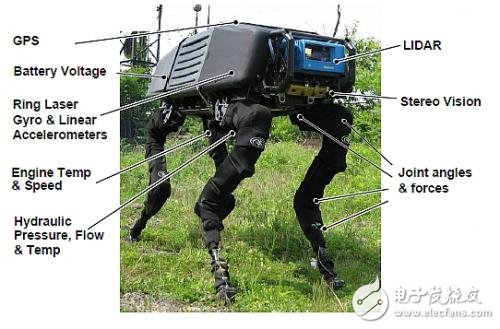
In addition to the 50 sensors, BigDog also features inertial sensors that measure posture and acceleration, while joint sensors monitor the force and action at each limb. The onboard computer processes all this information to estimate how the robot moves in space. Other sensors track hydraulic pressure, flow, temperature, engine speed, and more, ensuring the robot can maintain stability and efficiency in various conditions.
Robots perceive their environment through an array of sensors (Photo courtesy of Boston Dynamics).
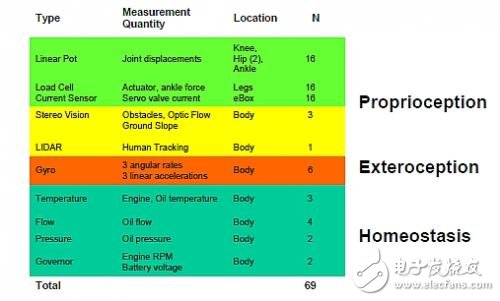
In the paper "The Body and the Senses: The Perception of Space" by M. Wonders Masters, Brian Massumi discusses three levels of bodily perception: external sensations, proprioception, and inner feelings. External sensations include sight, sound, touch, taste, and smell. Proprioception refers to the body's ability to sense its own position and movement, converting physical actions into muscle memory. Inner feelings, on the other hand, are immediate responses to sensory input before the brain fully processes them. These layers correspond to different ways we interact with the world, reflecting the complex relationship between the body and the environment.
Wireless Industrial Barcode Scanner
Wireless Industrial Barcode Scanner,Industrial Wireless Barcode Scanner,Industrial 2D Barcode Scanner,Industrial Bar Code Scanner
Guangzhou Winson Information Technology Co., Ltd. , https://www.barcodescanner-2d.com